Materialise Grippers for Assembly Line Automation
Materialise’s pneumatic grippers made an appearance at the EXPO MILANO 2015, giving a hand (literally) to ABB’s dual-arm robot, YuMi. With these grippers, YuMi can do much of what human hands can do in an assembly-line job, with more precision and consistency.

In the Future Food District at the EXPO MILANO 2015, exhibits showed how new technologies could shape the supermarket of the future. ABB exhibited its dual-arm robot, YuMi, originally designed to automate small parts assembly in the consumer electronics industry. The grippers which make YuMi able to work in a wide range of tasks were made by Materialise. With these grippers, YuMi can do much of what human hands can do in an assembly-line job, with more precision and consistency.
So how do you hit upon a successful design for 3D-printed grippers which could make assembly lines everywhere more efficient?
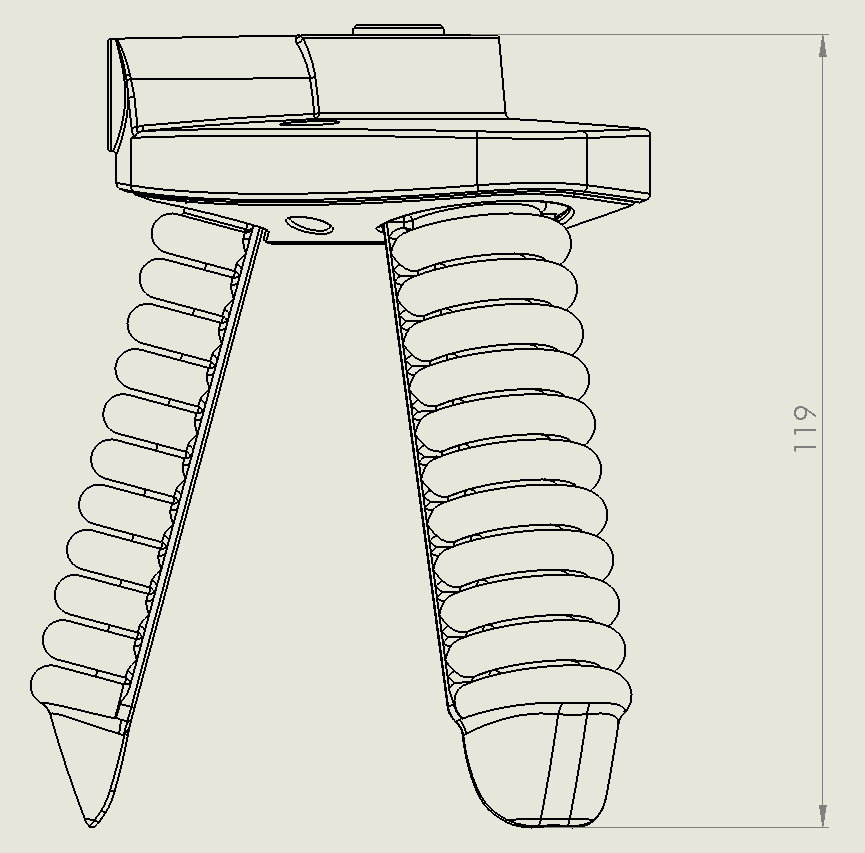
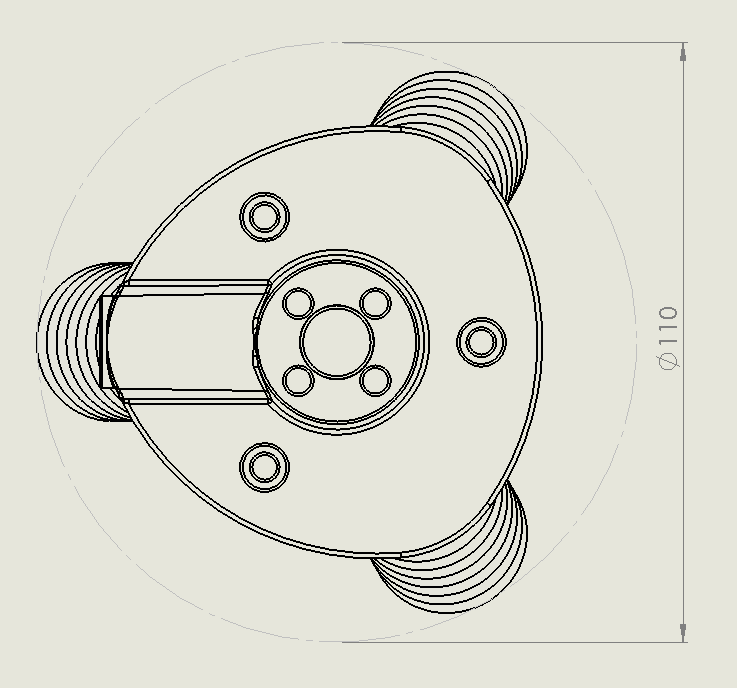
Medium gripper side and top
Early stages: Developing a hinge-free design
When the engineering team set out to design the first version of the automation grippers, about two years ago, most existing models were mechanical and featured hinges. The nature of the mechanism made these grippers liable to wear out, making them high-maintenance. The team’s first goal was therefore to design a gripper model that was hinge-free, one step closer to maintenance-free.
The kind of grippers on the EXPO MILANO YuMi are operated by air pressure and vacuum. By increasing pressure at a specific region on the inner wall of finger-shaped bellows, you cause the finger-shaped bellow to curve inwards at the point of pressure. Combined with the application of vacuum to expand the grip outwards, the bellows are able to curve inwards and outwards, much like your own fingers, to grip objects.
Like what you see?
Leading companies around Europe work with us to power their industrial automation processes. Talk to our Design & Engineering team to see what we can do for your projects.
Material considerations
The first generation of these grippers was laser-sintered with polyamide (PA 12). Although PA 12 has excellent long-term stability and works great for a wide range of applications, including the grippers’ base, it fell short of the ideal for the fingers. With the right design approaches, 3D-printed PA12 can achieve significant flexibility. However, in this application, PA 12 suffered over time from creep: the angles of movement were no longer as consistent as in the beginning. The grippers required a different and more durable kind of flexibility.
Several iterations later, the engineering team arrived upon its winning formula: a rubber-like, flexible material printed with laser-sintering. This material, TPU 92A-1, is unique in its combination of flexibility and strength. Its key features include durable elasticity and high resistance to dynamic loading, which make it ideal for the pneumatic grippers.
A lightweight solution
The fingers are now printed separately from the base, meaning that you can configure the fingers into the formation best suited for the product to be handled. For example, this could mean an additional longer finger to grip a product from underneath for added security, or interlocking fingers like those on a pair of human hands. This also means it is possible to replace individual fingers without having to replace the base or functional parts. Consequently, the grippers are lightweight, low-maintenance and highly customizable.